首页
教程
PX4
统计
关于
用户登录
用户名
密码
登录
关键词搜索
搜索
标签搜索
PX4
教程
ROS
VMware
Ubuntu
热门文章
1
PX4控制无人机的常用命令
527 阅读
2
PX4中自定义参数在QGC中设置
444 阅读
3
Ubuntu20.04下ROS1开发环境搭建(对应PX4 V1.14)
415 阅读
4
MAVROS功能包控制无人机进入offboard模式飞行官方例程(C++实现)
380 阅读
5
在ROS中集成PX4位置平滑PositionSmoothing功能
348 阅读
6
PX4中PositionSmoothing平滑详解(固件1.14)
293 阅读
7
环境配置之Ubuntu20.04版本(VMware版本)
285 阅读
8
PX4实战之通过OFFBOARD模式控制无人机自主飞行
284 阅读
9
Ego Plannerz中加入平滑功能
203 阅读
Viiicee
累计撰写
13
篇文章
累计添加
5
个标签
累计收到
1
条评论
首页
分类
教程
PX4
页面
统计
关于
用户登录
登录
“教程” 共(7)篇
Ego Plannerz中加入平滑功能
一、前言本文基于原文章《在 ROS 中集成 PX4 位置平滑 PositionSmoothing 功能》进行衍生与复刻,文章将详细介绍所需的准备工作、代码修改步骤以及遇到的常见问题和解决方法。二、准备工作1. 拷贝所需文件在开始之前,我们需要准备一些必要的文件并将其复制到项目的正确位置。具体步骤如下:1.1 创建 include 文件夹首先,进入目录 /Fast-Drone-250/src/rea...
3个月前
丨
203阅读
丨
0评论
教程
在ROS中集成PX4位置平滑PositionSmoothing功能
在ROS中集成PX4位置平滑功能一、背景在ROS中,发布目标点的过程通常是直接发布位置数据而未进行平滑处理,这可能引发控制上的不稳定等问题。为了提升平稳性,本项目引入了PX4中的位置平滑功能 PositionSmoothing。在之前的工作中,我们已成功将 PositionSmoothing 应用于PX4,因此希望进一步将其集成到ROS项目中,实现平滑的位置控制。二、准备工作在本文中,我们基于上一...
7个月前
丨
348阅读
丨
1评论
教程
MAVROS功能包控制无人机进入offboard模式飞行官方例程(C++实现)
MAVROS功能包控制无人机进入offboard模式飞行官方例程(C++实现)一. 准备工作首先,建立工作空间,并创建一个名为 uav_demo_ws 的目录结构。mkdir -p uav_demo_ws/src1. 创建功能包进入工作空间目录并创建功能包,命名为 offboard_run。cd uav_demo_ws/src catkin_create_pkg offboard_run rosc...
7个月前
丨
380阅读
丨
0评论
教程
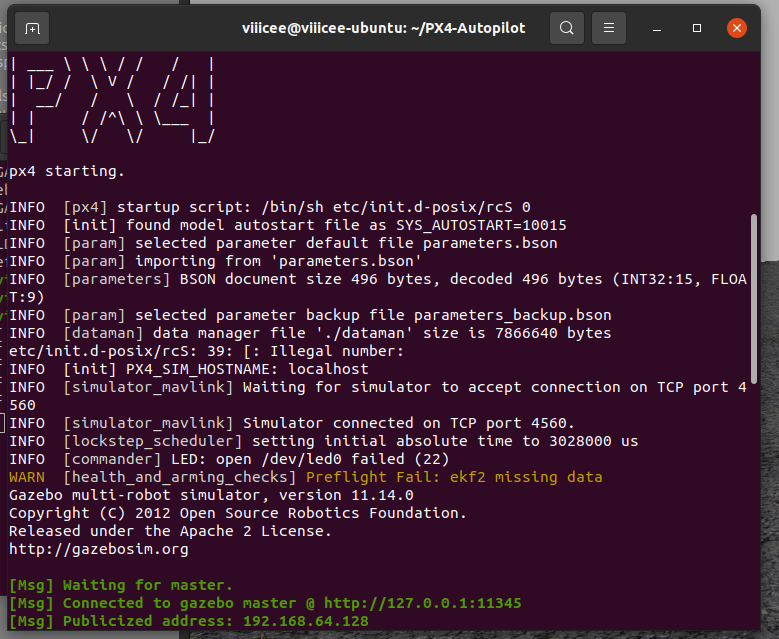
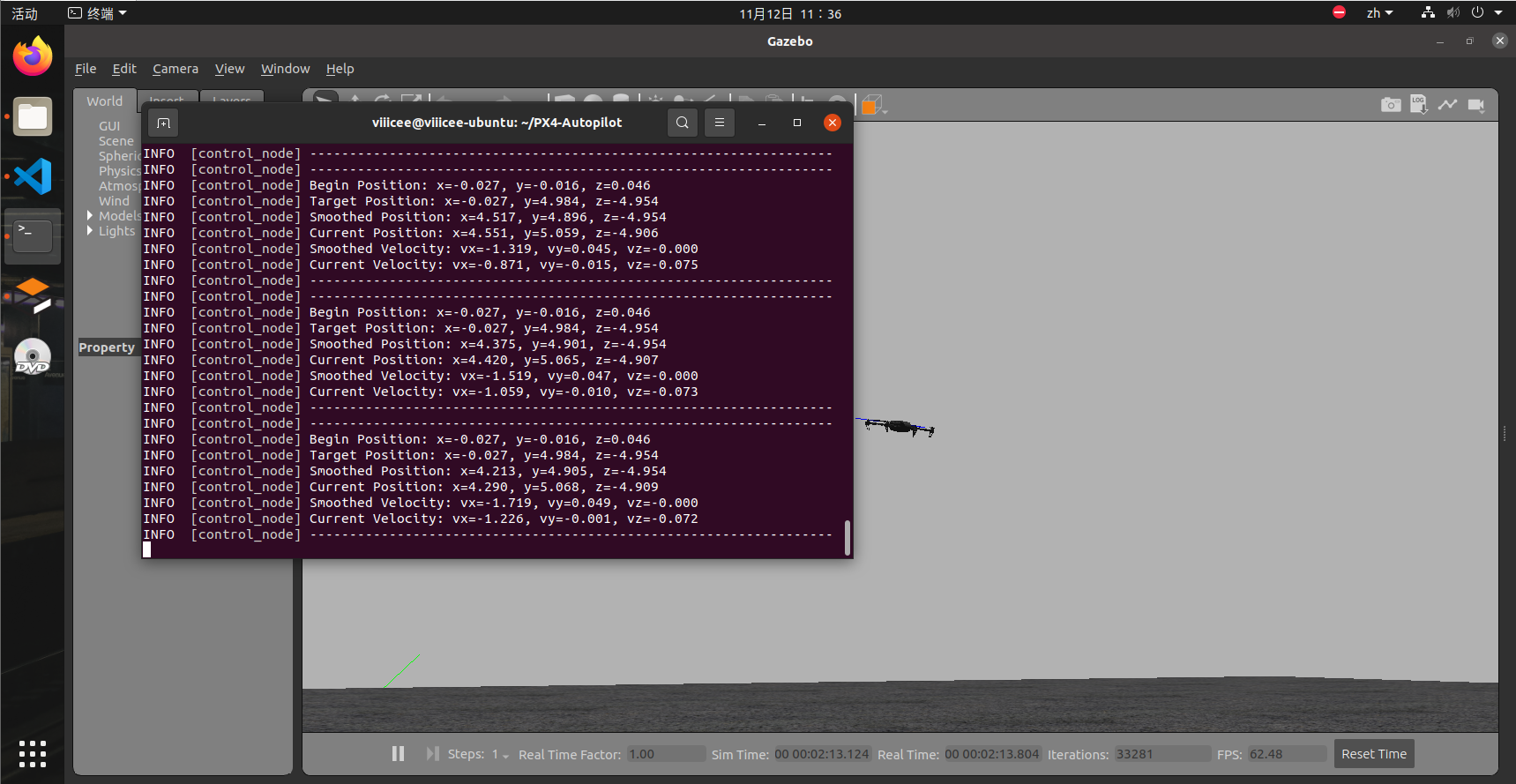
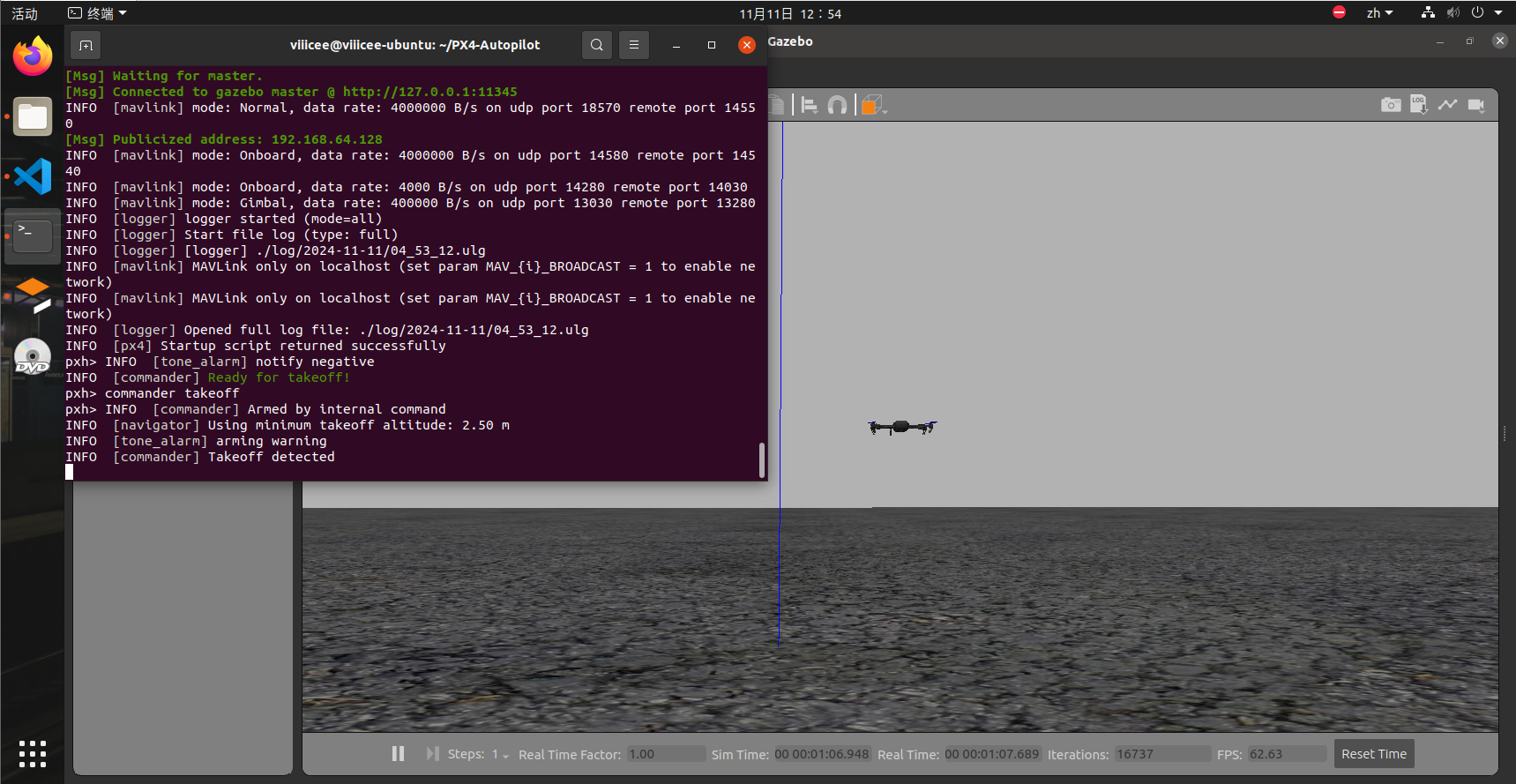
PX4实战之通过OFFBOARD模式控制无人机自主飞行
PX4实战之通过OFFBOARD模式控制无人机自主飞行固件版本:PX4 1.14一、准备工作1. 添加自定义模块首先,在 PX4-Autopilot/src/modules 目录下创建一个名为 control_node 的文件夹。接着,在 control_node 文件夹中创建以下四个文件:2. 新建并编辑文件创建 CMakeLists.txt在 control_node 文件夹中创建 CMake...
7个月前
丨
284阅读
丨
0评论
教程
PX4控制无人机的常用命令
PX4是一款开源的飞行控制系统,常用于控制无人机。在使用PX4控制无人机时,通常会通过MAVLink协议发送命令。以下是一些PX4常用的无人机控制命令:1. 基本飞行控制命令起飞 (Takeoff):命令:takeoff描述:无人机自动起飞到指定的高度(通常可以设置在参数中,如 MIS_TAKEOFF_ALT)。降落 (Land):命令:land描述:无人机在当前位置自动降落。悬停 (Hold):...
7个月前
丨
527阅读
丨
0评论
教程
1
2
Viiicee
13
文章数
5
标签数
1
评论量
人生倒计时
标签云
PX4
教程
ROS
VMware
Ubuntu
舔狗日记
目录