首页
教程
PX4
统计
关于
用户登录
用户名
密码
登录
关键词搜索
搜索
标签搜索
PX4
教程
ROS
VMware
Ubuntu
热门文章
1
PX4控制无人机的常用命令
527 阅读
2
PX4中自定义参数在QGC中设置
444 阅读
3
Ubuntu20.04下ROS1开发环境搭建(对应PX4 V1.14)
416 阅读
4
MAVROS功能包控制无人机进入offboard模式飞行官方例程(C++实现)
380 阅读
5
在ROS中集成PX4位置平滑PositionSmoothing功能
348 阅读
6
PX4中PositionSmoothing平滑详解(固件1.14)
293 阅读
7
环境配置之Ubuntu20.04版本(VMware版本)
285 阅读
8
PX4实战之通过OFFBOARD模式控制无人机自主飞行
285 阅读
9
Ego Plannerz中加入平滑功能
204 阅读
Viiicee
累计撰写
13
篇文章
累计添加
5
个标签
累计收到
1
条评论
首页
分类
教程
PX4
页面
统计
关于
用户登录
登录
“Ubuntu” 共(2)篇
Ubuntu20.04下ROS1开发环境搭建(对应PX4 V1.14)
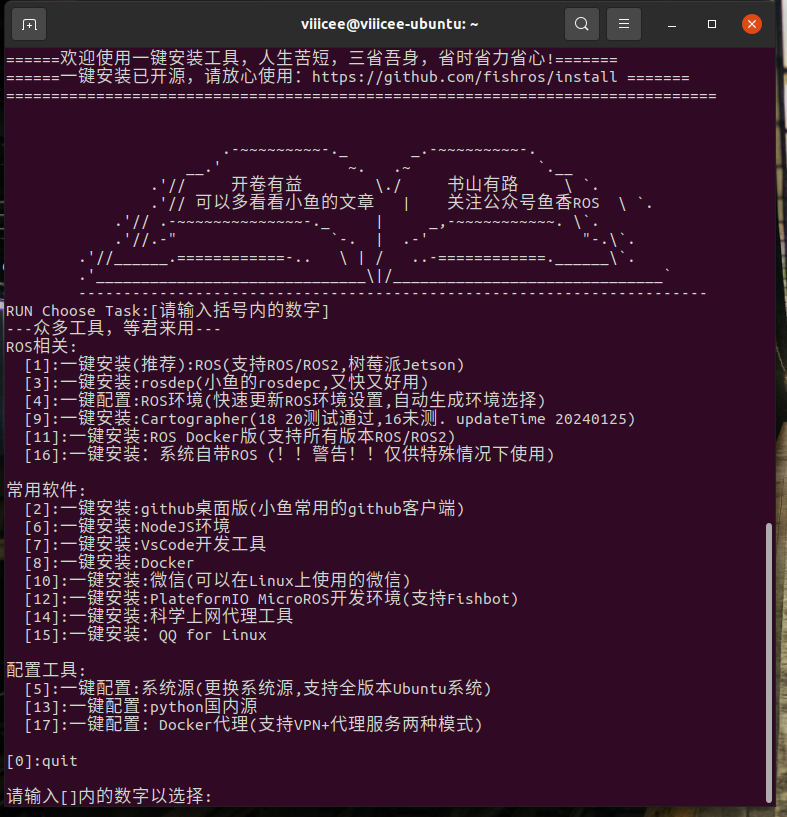
这篇文章的真的非常之坎坷在收到老师下发的任务时,由于没有要求PX4的固件版本,安装的是1.13版本,随后得知实验室使用的是1.14版本,又再次修改...1.ROS-noetic版本安装首先安装ROS,这里我选择的是鱼香ROS提供的一键安装版本(这个版本对于小白非常友好,强推!)wget http://fishros.com/install -O fishros && . fishr...
7个月前
丨
416阅读
丨
0评论
教程
环境配置之Ubuntu20.04版本(VMware版本)
VMware安装ubuntu20.04
7个月前
丨
285阅读
丨
0评论
教程
Viiicee
13
文章数
5
标签数
1
评论量
人生倒计时
标签云
PX4
教程
ROS
VMware
Ubuntu
舔狗日记
目录